Winter Project - Cam Tracker
December 15, 2018
This was a project that I worked on for the winter project requirement of my Master’s in Robotics degree at Northwestern. The goal was to use a high-speed, global shutter camera mounted on two servos to track a thrown object. Stretch goals were to be able to predict the trajectory of a thrown object, and have Sawyer intercept this trajcetory, effectively catching the thrown object.
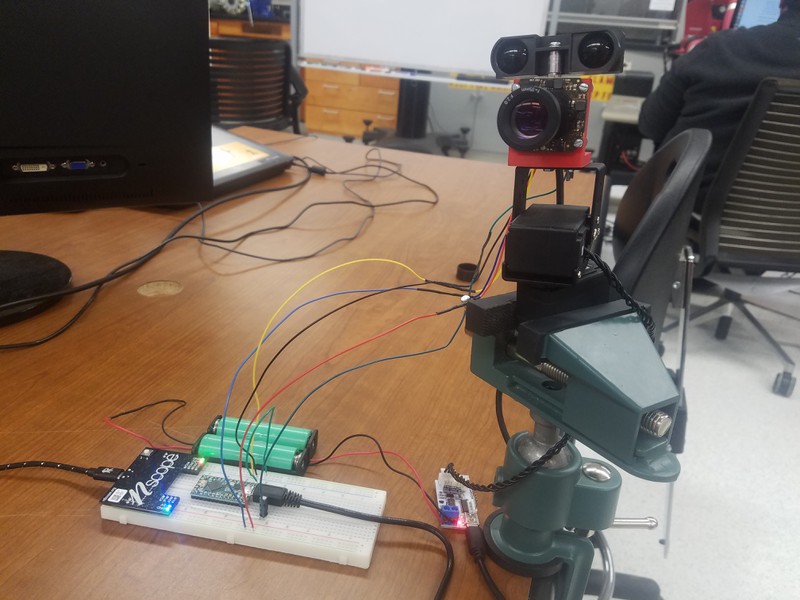
The most crucial piece of hardware used in this project was by far the camera, an mvBlueFox-MLC200w Board-level, global suhtter, gray scale video camera. I attached a 35mm lens to the camera for this project. The view from the camera’s POV can be seen below.

In its current state, this project requires much more work. If you are interested in reading more about it, please find its README and GitHub repo here